 This is the third benchmark in a series of 110x motor thrust tests I will be doing in the next few weeks. You can read more about the background of those tests in my overview post.
This is the third benchmark in a series of 110x motor thrust tests I will be doing in the next few weeks. You can read more about the background of those tests in my overview post.
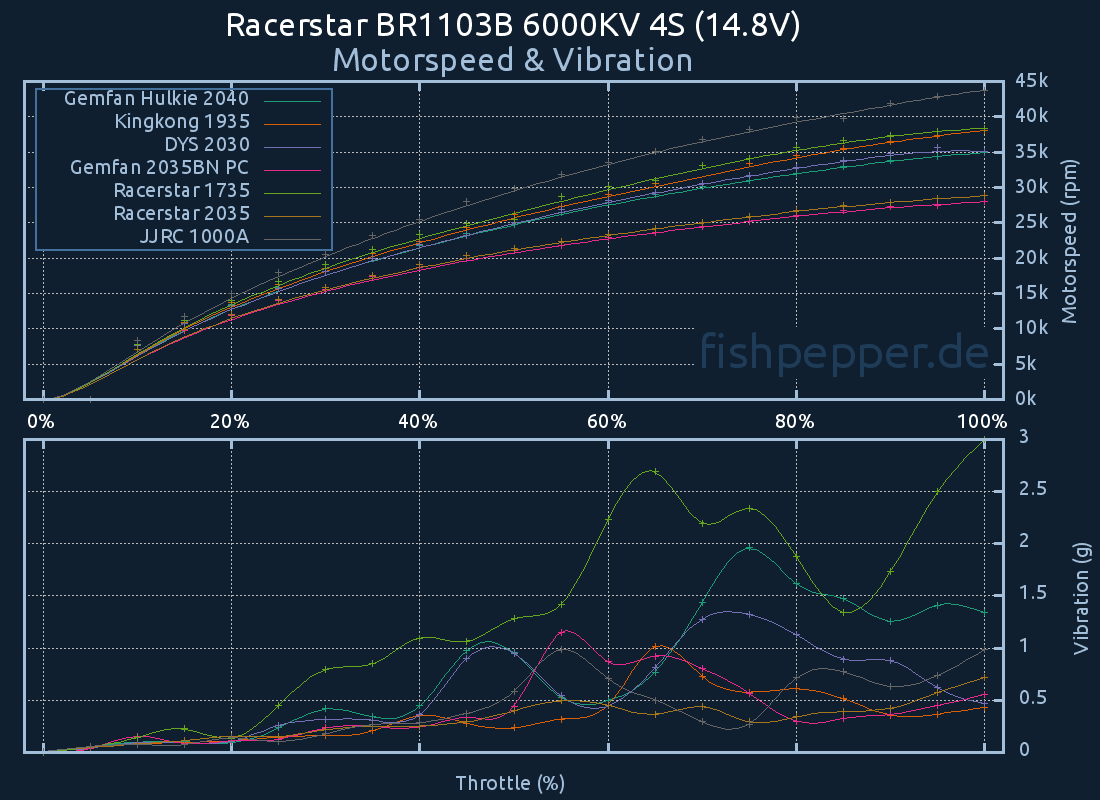
This time I will be testing the Racerstar BR1103B that I recently rewound to 6000 KV. Well, actually I planned to rewind it to ~6500KV but it turned out having 6000KV. I was curious to see how those BR1103B motors would behave on 3S and on 4S. Will this result in a higher efficiency? Thrust to the moon? — Time to find out!
Please note that the FuriousFPV propeller is missing in this test, it’s still in transit. I will update the charts once it arrives.
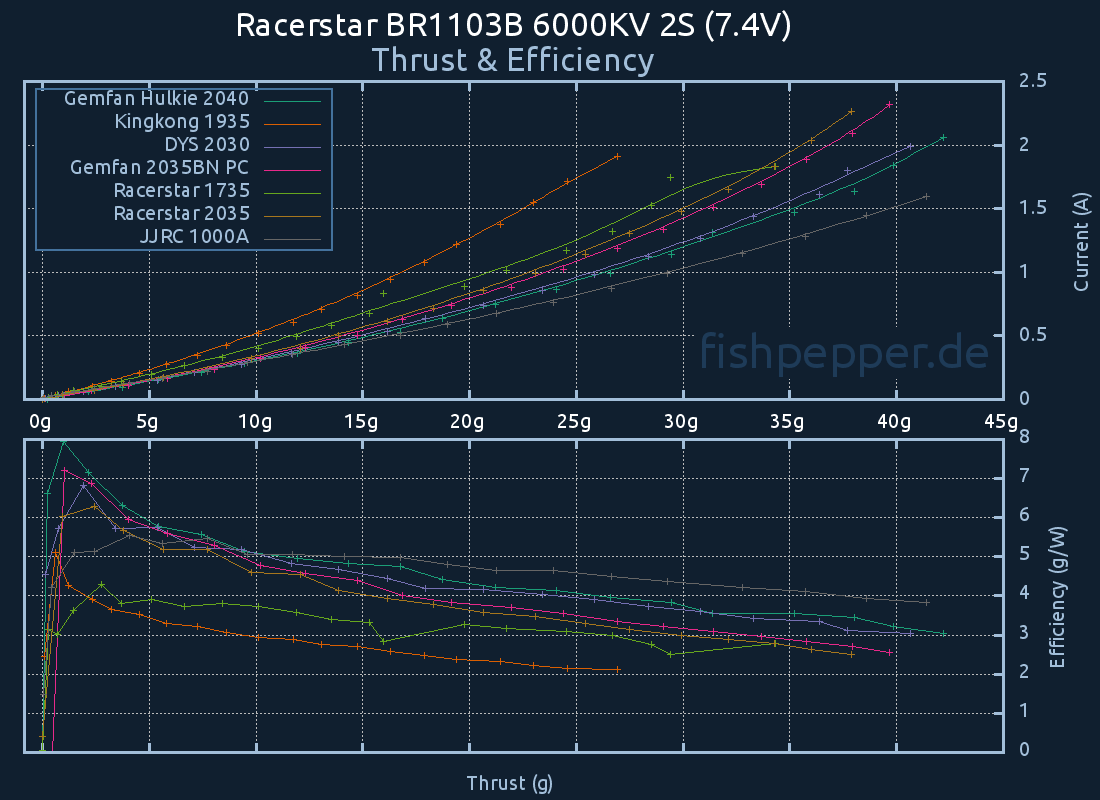
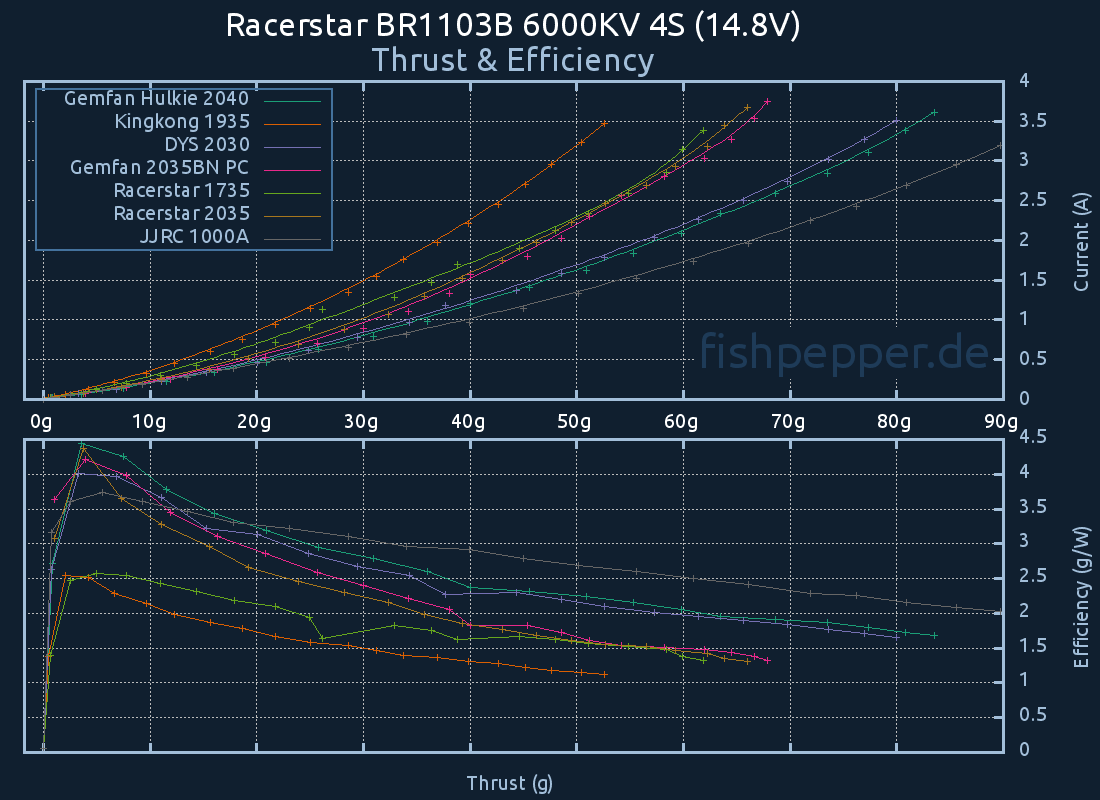
Thrust & Efficiency

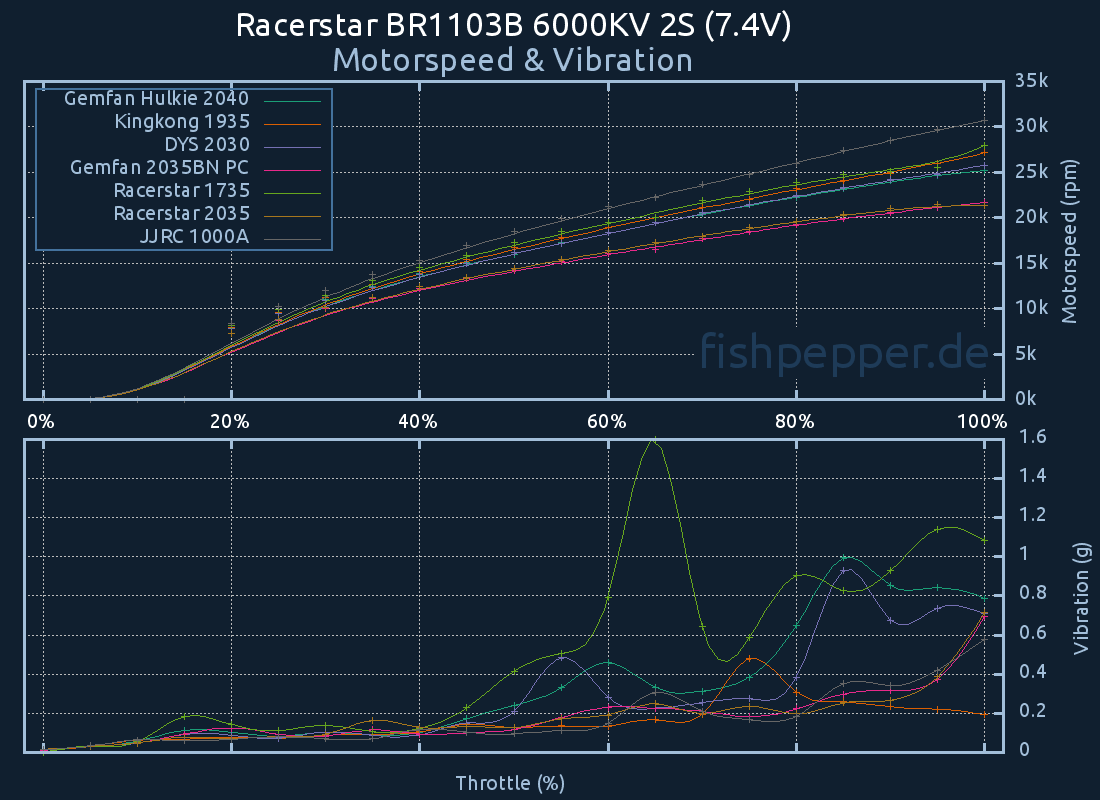
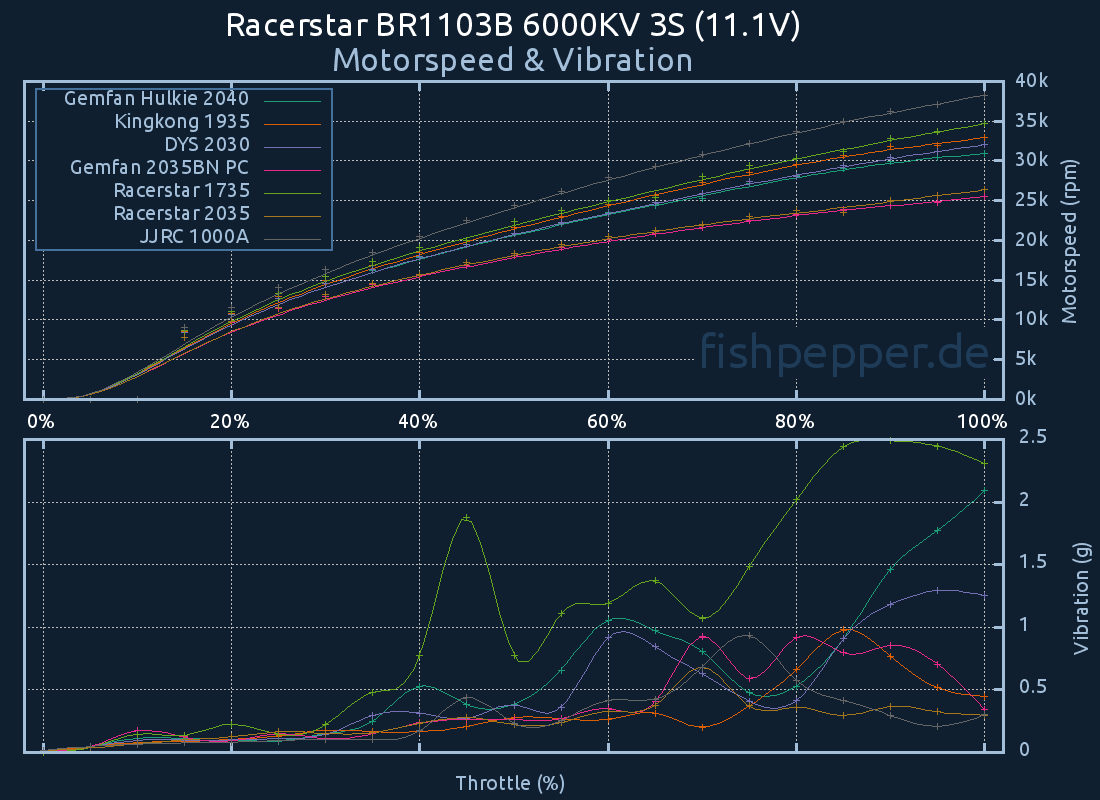
Speed & Vibrations
Tables
| Thrust [g] | Vibration [g] | Speed [rpm] | Current [A] | Efficiency [g/W] | |||
7.4V | 10g | 10.0 | 0.2 | 13417 | 0.3 | 3.8 | |
| 20g | 20.0 | 0.5 | 18310 | 0.7 | 3.5 | ||
| 30g | 30.0 | 0.7 | 22104 | 1.3 | 3.0 | ||
| max | 41.0 | 0.8 | 25220 | 2.1 | 2.6 | ||
11.1V | 10g | 10.0 | 0.1 | 13016 | 0.3 | 3.6 | |
| 20g | 20.0 | 0.5 | 17983 | 0.6 | 3.1 | ||
| 30g | 30.0 | 0.5 | 21806 | 1.0 | 2.8 | ||
| max | 63.2 | 1.8 | 30927 | 2.9 | 2.0 | ||
14.8V | 10g | 10.0 | 0.1 | 12571 | 0.2 | 3.5 | |
| 20g | 20.0 | 0.4 | 17711 | 0.4 | 3.0 | ||
| 30g | 30.0 | 0.4 | 21593 | 0.8 | 2.7 | ||
| max | 83.4 | 1.2 | 34916 | 3.6 | 1.6 | ||
| Thrust [g] | Vibration [g] | Speed [rpm] | Current [A] | Efficiency [g/W] | |||
7.4V | 10g | 10.0 | 0.2 | 16419 | 0.5 | 2.6 | |
| 20g | 20.0 | 0.3 | 23373 | 1.2 | 2.1 | ||
| 30g | - | - | - | - | - | ||
| max | 27.1 | 0.2 | 27149 | 1.9 | 1.9 | ||
11.1V | 10g | 10.0 | 0.2 | 16166 | 0.4 | 2.3 | |
| 20g | 20.0 | 0.3 | 23146 | 1.0 | 1.9 | ||
| 30g | 30.0 | 0.4 | 28631 | 1.7 | 1.6 | ||
| max | 41.0 | 0.4 | 32995 | 2.8 | 1.4 | ||
14.8V | 10g | 10.0 | 0.2 | 15922 | 0.3 | 2.2 | |
| 20g | 20.0 | 0.3 | 22827 | 0.8 | 1.7 | ||
| 30g | 30.0 | 0.4 | 27706 | 1.4 | 1.5 | ||
| max | 53.3 | 0.4 | 38070 | 3.5 | 1.0 | ||
| Thrust [g] | Vibration [g] | Speed [rpm] | Current [A] | Efficiency [g/W] | |||
7.4V | 10g | 10.0 | 0.1 | 12637 | 0.3 | 4.4 | |
| 20g | 20.0 | 0.4 | 17993 | 0.7 | 3.7 | ||
| 30g | 30.0 | 0.4 | 22009 | 1.2 | 3.2 | ||
| max | 40.9 | 0.7 | 25803 | 2.0 | 2.7 | ||
11.1V | 10g | 10.0 | 0.2 | 12551 | 0.2 | 3.9 | |
| 20g | 20.0 | 0.3 | 17798 | 0.5 | 3.3 | ||
| 30g | 30.0 | 0.4 | 21861 | 0.9 | 2.9 | ||
| max | 62.8 | 1.1 | 32061 | 2.8 | 2.0 | ||
14.8V | 10g | 10.0 | 0.1 | 12364 | 0.2 | 3.6 | |
| 20g | 20.0 | 0.3 | 17794 | 0.4 | 3.0 | ||
| 30g | 30.0 | 0.4 | 21911 | 0.8 | 2.6 | ||
| max | 80.5 | 0.5 | 35032 | 3.5 | 1.6 | ||
| Thrust [g] | Vibration [g] | Speed [rpm] | Current [A] | Efficiency [g/W] | |||
7.4V | 10g | 10.0 | 0.2 | 10948 | 0.3 | 4.1 | |
| 20g | 20.0 | 0.2 | 15425 | 0.8 | 3.3 | ||
| 30g | 30.0 | 0.2 | 18785 | 1.4 | 2.8 | ||
| max | 39.8 | 0.7 | 21639 | 2.3 | 2.2 | ||
11.1V | 10g | 10.0 | 0.2 | 10778 | 0.2 | 3.9 | |
| 20g | 20.0 | 0.2 | 15214 | 0.6 | 3.1 | ||
| 30g | 30.0 | 0.3 | 18626 | 1.1 | 2.6 | ||
| max | 57.2 | 0.3 | 25493 | 3.2 | 1.6 | ||
14.8V | 10g | 10.0 | 0.1 | 10793 | 0.2 | 3.5 | |
| 20g | 20.0 | 0.2 | 15226 | 0.5 | 2.8 | ||
| 30g | 30.0 | 0.3 | 18636 | 0.9 | 2.3 | ||
| max | 68.1 | 0.5 | 28026 | 3.8 | 1.2 | ||
| Thrust [g] | Vibration [g] | Speed [rpm] | Current [A] | Efficiency [g/W] | |||
7.4V | 10g | 10.0 | 0.3 | 15818 | 0.4 | 3.2 | |
| 20g | 20.0 | 0.7 | 22006 | 0.9 | 2.8 | ||
| 30g | 30.0 | 1.1 | 25857 | 1.8 | 2.2 | ||
| max | 34.3 | 1.1 | 27921 | 1.8 | 2.4 | ||
11.1V | 10g | 10.0 | 0.2 | 13406 | 0.2 | 3.8 | |
| 20g | 20.0 | 1.3 | 20892 | 0.7 | 2.5 | ||
| 30g | 30.0 | 1.1 | 25991 | 1.3 | 2.1 | ||
| max | 53.8 | 1.9 | 34671 | 2.7 | 1.8 | ||
14.8V | 10g | 10.0 | 0.2 | 10588 | 0.1 | 5.2 | |
| 20g | 20.0 | 0.7 | 19252 | 0.5 | 3.0 | ||
| 30g | 30.0 | 0.9 | 24685 | 0.9 | 2.3 | ||
| max | 67.3 | 2.5 | 38399 | 3.4 | 1.4 | ||
| Thrust [g] | Vibration [g] | Speed [rpm] | Current [A] | Efficiency [g/W] | |||
7.4V | 10g | 10.0 | 0.2 | 11193 | 0.3 | 4.0 | |
| 20g | 20.0 | 0.2 | 16059 | 0.8 | 3.2 | ||
| 30g | 30.0 | 0.3 | 19611 | 1.5 | 2.7 | ||
| max | 38.1 | 0.7 | 21331 | 2.3 | 2.2 | ||
11.1V | 10g | 10.0 | 0.2 | 11240 | 0.2 | 3.7 | |
| 20g | 20.0 | 0.3 | 15729 | 0.6 | 2.9 | ||
| 30g | 30.0 | 0.3 | 19487 | 1.1 | 2.4 | ||
| max | 55.7 | 0.3 | 26358 | 3.1 | 1.6 | ||
14.8V | 10g | 10.0 | 0.2 | 11143 | 0.2 | 3.3 | |
| 20g | 20.0 | 0.2 | 15994 | 0.5 | 2.5 | ||
| 30g | 30.0 | 0.3 | 19432 | 0.9 | 2.2 | ||
| max | 66.5 | 0.7 | 28804 | 3.7 | 1.2 | ||
| Thrust [g] | Vibration [g] | Speed [rpm] | Current [A] | Efficiency [g/W] | |||
7.4V | 10g | 10.0 | 0.2 | 15488 | 0.3 | 4.3 | |
| 20g | 20.0 | 0.3 | 21592 | 0.6 | 4.2 | ||
| 30g | 30.0 | 0.3 | 26203 | 1.0 | 3.8 | ||
| max | 41.6 | 0.6 | 30727 | 1.6 | 3.4 | ||
11.1V | 10g | 10.0 | 0.1 | 15508 | 0.2 | 3.7 | |
| 20g | 20.0 | 0.3 | 21570 | 0.5 | 3.5 | ||
| 30g | 30.0 | 0.3 | 26326 | 0.8 | 3.3 | ||
| max | 66.6 | 0.3 | 38299 | 2.4 | 2.5 | ||
14.8V | 10g | 10.0 | 0.2 | 15491 | 0.2 | 3.3 | |
| 20g | 20.0 | 0.2 | 21676 | 0.4 | 3.1 | ||
| 30g | 30.0 | 0.3 | 26197 | 0.7 | 2.9 | ||
| max | 89.7 | 0.9 | 43784 | 3.2 | 1.9 | ||
Conclusions
I will draw my conclusions once my thrust tests are all done. I will update this post once I finished all my tests.
For now you can find all my 110x thrust tests in this link list:
- Thrust-Test: AOKFLY RV1106 4000KV (5/23/2018)
- Thrust-Test: Brotherhobby Returner R3 1106 5100KV (12/7/2017)
- Thrust-Test: DYS BE1104 6500KV (12/3/2017)
- Thrust-Test: Racerstar BR1103B 6000KV (rewound) (12/1/2017)
- Thrust-Test: EMAX RS1106 4500KV (11/29/2017)
- Thrust-Test: Racerstar BR1103B 4500KV (rewound) (11/23/2017)
- Thrust testing 110X motors — Time for the truth in numbers! (11/23/2017)
Hi!
I just saw that you have some experience in re-winding those motors to lower kv values.
I would like to build a really small gimbal to just support the runcam split, and i would like to use 110X motors for this. Unfortunately high kv is impracical for using as a gimbal motor.
What do you think to what minimum range such a motor can be rewound to and still be able to support such a small camera?
Best regards!
I think the minimum KV is limited by how thin wires you can handle (low KV = high number of turns). I have no Idea what KV values are used on Gimbals, just do some maths and calculate how many turns you will need for which KV value and just give it a try! See https://fishpepper.de/2017/11/10/tutorial-brushless-motor-rewinding-based-on-a-br1103b/ for a tutorial 😉